Macrolitter video counting on riverbanks using state space models and moving cameras#
Abstract#
Litter is a known cause of degradation in marine environments and most of it travels in rivers before reaching the oceans. In this paper, we present a novel algorithm to assist waste monitoring along watercourses. While several attempts have been made to quantify litter using neural object detection in photographs of floating items, we tackle the more challenging task of counting directly in videos using boat-embedded cameras. We rely on multi-object tracking (MOT) but focus on the key pitfalls of false and redundant counts which arise in typical scenarios of poor detection performance. Our system only requires supervision at the image level and performs Bayesian filtering via a state space model based on optical flow. We present a new open image dataset gathered through a crowdsourced campaign and used to train a center-based anchor-free object detector. Realistic video footage assembled by water monitoring experts is annotated and provided for evaluation. Improvements in count quality are demonstrated against systems built from state-of-the-art multi-object trackers sharing the same detection capabilities. A precise error decomposition allows clear analysis and highlights the remaining challenges.
Introduction#
Litter pollution concerns every part of the globe. Each year, almost ten thousand million tons of plastic waste is generated, among which 80% ends up in landfills or in nature [1], notably threatening all of the world’s oceans, seas and aquatic environments [2, 3]. Plastic pollution is known to already impact more than 3763 marine species worldwide (see this detailed analysis) with risk of proliferation through the whole food chain. This accumulation of waste is the endpoint of the largely misunderstood path of trash, mainly coming from land-based sources [4], yet rivers have been identified as a major pathway for the introduction of waste into marine environments [5]. Therefore, field data on rivers and monitoring are strongly needed to assess the impact of measures that can be taken. The analysis of such field data over time is pivotal to understand the efficiency of the actions implemented such as choosing zero-waste alternatives to plastic, designing new products to be long-lasting or reusable, introducing policies to reduce over-packing.
Different methods have already been tested to monitor waste in rivers: litter collection and sorting on riverbanks [6], visual counting of drifting litter from bridges [7], floating booms [8] and nets [9]. All are helpful to understand the origin and typology of litter pollution yet hardly compatible with long term monitoring at country scales. Monitoring tools need to be reliable, easy to set up on various types of rivers, and should give an overview of plastic pollution during peak discharge to help locate hotspots and provide trends. Newer studies suggest that plastic debris transport could be better understood by counting litter trapped on river banks, providing a good indication of the local macrolitter pollution especially after increased river discharge [10, 11]. Based on these findings, we propose a new method for litter monitoring which relies on videos of river banks directly captured from moving boats.
In this case, object detection with deep neural networks (DNNs) may be used, but new challenges arise. First, available data is still scarce. When considering entire portions of river banks from many different locations, the variety of scenes, viewing angles and/or light conditions is not well covered by existing plastic litter datasets like [12], where litter is usually captured from relatively close distances and many times in urban or domestic backgrounds. Therefore, achieving robust object detection across multiple conditions is still delicate.
Second, counting from videos is a different task than counting from independent images, because individual objects will typically appear in several consecutive frames, yet they must only be counted once. This last problem of association has been extensively studied for the multi-object tracking (MOT) task, which aims at recovering individual trajectories for objects in videos. When successful MOT is achieved, counting objects in videos is equivalent to counting the number of estimated trajectories. Deep learning has been increasingly used to improve MOT solutions [13]. However, newer state-of-the-art techniques require increasingly heavy and costly supervision, typically all object positions provided at every frame. In addition, many successful techniques [14] can hardly be used in scenarios with abrupt and nonlinear camera motion. Finally, while research is still active to rigorously evaluate performance at multi-object tracking [15], most but not all aspects of the latter may affect global video counts, which calls for a separate evaluation protocol dedicated to multi-object counting.
Our contribution can be summarized as follows.
We provide a novel open-source image dataset of macro litter, which includes various objects seen from different rivers and different contexts. This dataset was produced with a new open-sourced platform for data gathering and annotation developed in conjunction with Surfrider Foundation Europe, continuously growing with more data.
We propose a new algorithm specifically tailored to count in videos with fast camera movements. In a nutshell, DNN-based object detection is paired with a robust state space movement model which uses optical flow to perform Bayesian filtering, while confidence regions built on posterior predictive distributions are used for data association. This framework does not require video annotations at training time: the multi-object tracking module does not require supervision, only the DNN-based object detection does require annotated images. It also fully leverages optical flow estimates and the uncertainty provided by Bayesian predictions to recover object identities even when detection recall is low. Contrary to existing MOT solutions, this method ensures that tracks are stable enough to avoid repeated counting of the same object.
We provide a set of video sequences where litter counts are known and depicted in real conditions. For these videos only, litter positions are manually annotated at every frame in order to carefully analyze performance. This allows us to build new informative count metrics. We compare the count performance of our method against other MOT-based alternatives.
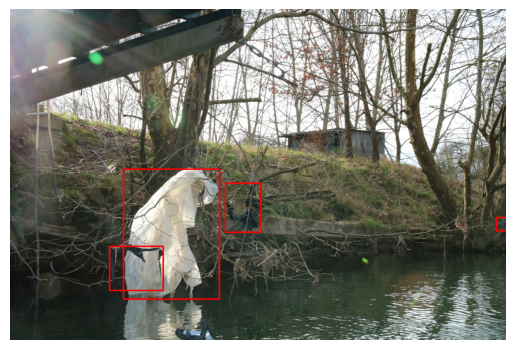
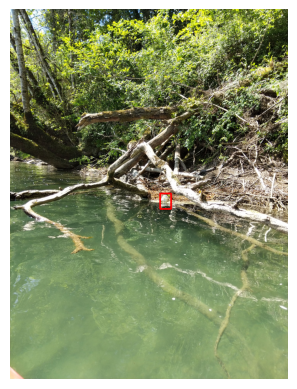
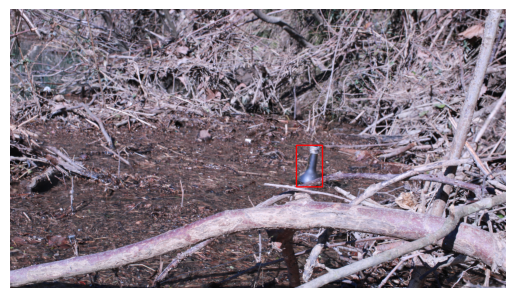
A first visual illustration of the second claim is presented via the following code chunks: on three selected frames, we present a typical scenario where our strategy can avoid overcounting the same object (we depict internal workings of our solution against the end result of the competitors).
---Downloading: saved_detections.pickle
---Downloading: saved_frames.pickle
EKF will be used for tracking.
Tracking...
Tracking done.

Fig. 1 Our method: one object (red dot) is correctly detected at every frame and given a consistent identity throughout the sequence with low location uncertainty (red ellipse). Next to it, a false positive detection is generated at the first frame (brown dot) but immediatly lost in the following frames: the associated uncertainty grows fast (brown ellipse). In our solution, this type of track will not be counted. A third correctly detected object (pink) appears in the third frame and begins a new track.#
Tracking with SORT...
--- Begin SORT internal logs
Total Tracking took: 0.073 seconds for 360 frames or 4958.9 FPS
--- End

Fig. 2 SORT: the resulting count is also 2, but both counts arise from tracks generated by the same object, the latter not re-associated at all in the second frame. Additionally, the third object is discarded (in post-processing) by their strategy.#
Datasets for training and evaluation#
Our main dataset of annotated images is used to train the object detector. Then, only for evaluation purposes, we provide videos with annotated object positions and known global counts. Our motivation is to avoid relying on training data that requires this resource-consuming process.
Images#
Data collection#
With help from volunteers, we compile photographs of litter stranded on river banks after increased river discharge, shot directly from kayaks navigating at varying distances from the shore. Images span multiple rivers with various levels of water current, on different seasons, mostly in southwestern France. The resulting pictures depict trash items under the same conditions as the video footage we wish to count on, while spanning a wide variety of backgrounds, light conditions, viewing angles and picture quality.
Bounding box annotation#
For object detection applications, the images are annotated using a custom online platform where each object is located using a bounding box. In this work, we focus only on litter counting without classification, however the annotated objects are already classified into specific categories which are described in Trash categories defined to facilitate porting to a counting system that allows trash identification.
A few samples are depicted below:
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
15 images loaded












Video sequences#
Data collection#
For evaluation, an on-field study was conducted with 20 volunteers to manually count litter along three different riverbank sections in April 2021, on the Gave d’Oloron near Auterrive (Pyrénées-Atlantiques, France), using kayaks. The river sections, each 500 meters long, were precisely defined for their differences in background, vegetation, river current, light conditions and accessibility (see this section for aerial views of the shooting site and details on the river sections). In total, the three videos amount to 20 minutes of footage at 24 frames per second (fps) and a resolution of 1920x1080 pixels.
Track annotation#
On video footage, we manually recovered all visible object trajectories on each river section using an online video annotation tool (more details here for the precise methodology). From that, we obtained a collection of distinct object tracks spanning the entire footage.
Optical flow-based counting via Bayesian filtering and confidence regions#
Our counting method is divided into several interacting blocks. First, a detector outputs a set of predicted positions for objects in the current frame. The second block is a tracking module designing consistent trajectories of potential objects within the video. At each frame, a third block links the successive detections together using confidence regions provided by the tracking module, proposing distinct tracks for each object. A final postprocessing step only keeps the best tracks which are enumerated to yield the final count.
Detector#
Center-based anchor-free detection#
In most benchmarks, the prediction quality of object attributes like bounding boxes is often used to improve tracking. For counting, however, point detection is theoretically enough and advantageous in many ways. First, to build large datasets, a method which only requires the lightest annotation format may benefit from more data due to annotation ease. Second, contrary to previous popular methods [22] involving intricate mechanisms for bounding box prediction, center-based and anchor-free detectors [34, 35] only use additional regression heads which can simply be removed for point detection. Adding to all this, [30] highlight conceptual and experimental reasons to favor anchor-free detection in tracking-related tasks.
For these reasons, we use a stripped version of CenterNet [34] where offset and bounding box regression heads are discarded to output bare estimates of center positions on a coarse grid.
An encoder-decoder network takes an input image \(I \in [0,1]^{w \times h \times 3}\) (an RGB image of width \(w\) and height \(h\)), and produces a heatmap \(\hat{Y} \in [0,1]^{\lfloor w/p\rfloor \times \lfloor h/p\rfloor}\) such that \(\hat{Y}_{xy}\) is the probability that \((x,y)\) is the center of an object (\(p\) being a stride coefficient).
At inference, peak detection and thresholding are applied to \(\hat{Y}\), yielding the set of detections.
The bulk of this detector relies on the DLA34 architecture [36].
In a video, for each frame \(I_n \in [0,1]^{w \times h \times 3}\) (where \(n\) indexes the frame number), the detector outputs a set \(\detectset_n = \{z_n^i\}_{1 \leq i \leq D_n}\) where each \(z_n^i = (x_n^i,y_n^i)\) specifies the coordinates of one of the \(D_n\) detected objects.
Training#
Training the detector is done similarly as in [12]. For every image, the corresponding set \(\mathcal{B} = \{(c^w_i,c^h_i,w_i,h_i)\}_{1 \leq i\leq B}\) of \(B\) annotated bounding boxes – i.e. a center \((c^w_i,c^h_i)\), a width \(w_i\) and a height \(h_i\)– is rendered into a ground truth heatmap \(Y \in [0,1]^{{\lfloor w/p\rfloor \times \lfloor h/p\rfloor}}\) by applying kernels at the bounding box centers and taking element-wise maximum. For all \(1 \leq x \leq w/p\), \(1 \leq y \leq h/p\), the ground truth at \((x,y)\) is
where \(\sigma_i\) is a parameter depending on the size of the object. Training the detector is done by minimizing a penalty-reduced weighted focal loss
where \(\alpha\), \(\beta\) are hyperparameters and
Bayesian tracking with optical flow#
Optical flow#
Between two timesteps \(n-1\) and \(n\), the optical flow \(\Delta_n\) is a mapping satisfying the following consistency constraint [37]:
where, in our case, \(\widetilde{I}_n\) denotes the frame \(n\) downsampled to dimensions \(\lfloor w/p\rfloor \times \lfloor h/p\rfloor\) and \(u = (x,y)\) is a coordinate on that grid. To estimate \(\Delta_n\), we choose a simple unsupervised Gunner-Farneback algorithm which does not require further annotations, see [38] for details.
State space model#
Using optical flow as a building block, we posit a state space model where estimates of \(\Delta_n\) are used as a time and state-dependent offset for the state transition. Let \((X_k)_{k \geq 1}\) and \((Z_k)_{k \geq 1}\) be the true (but hidden) and observed (detected) positions of a target object in \(\Rset^2\), respectively. Considering the optical flow value associated with \(X_{k-1}\) on the discrete grid of dimensions \(\lfloor w/p\rfloor \times \lfloor h/p\rfloor\), write
and
where \((\eta_k)_{k\geq 1}\) are i.i.d. centered Gaussian random variables with covariance matrix \(Q\) independent of \((\varepsilon_k)_{k\geq 1}\) i.i.d. centered Gaussian random variables with covariance matrix \(R\). In the following, \(Q\) and \(R\) are assumed to be diagonal, and are hyperparameters set to values given in Covariance matrices for state and observation noises.
Approximations of the filtering distributions#
Denoting \(u_{1:k} = (u_1,\ldots,u_k)\) for any \(k\) and sequence \((u_i)_{i \geq 0}\), Bayesian filtering aims at computing the conditional distribution of \(X_k\) given \(Z_{1:k}\), referred to as the filtering distribution. In the case of linear and Gaussian state space models, this distribution is known to be Gaussian, and Kalman filtering allows to update exactly the posterior mean \(\mu_k = \esp[X_k|Z_{1:k}]\) and posterior variance matrix \(\Sigma_k = \var[X_k|Z_{1:k}]\). This algorithm and its extensions are prevalent and used extensively in time-series and sequential-data analysis. As the transition model proposed in (1) is nonlinear, Kalman updates cannot be implemented and solving the target tracking task requires resorting to alternatives. Many solutions have been proposed to deal with strong nonlinearities in the literature, such as unscented Kalman filters (UKF) or Sequential Monte Carlo (SMC) methods (see [39] and references therein). Most SMC methods have been widely studied and shown to be very effective even in presence of strongly nonlinear dynamics and/or non-Gaussian noise, however such sample-based solutions are computationally intensive, especially in settings where many objects have to be tracked and false positive detections involve unnecessary sampling steps. On the other hand, UKF requires fewer samples and provides an intermediary solution in presence of mild nonlinearities. In our setting, we find that a linearisation of the model (1) yields approximation which is computationally cheap and as robust on our data:
where \(\partial_X\) is the derivative operator with respect to the 2-dimensional spatial input \(X\).
This allows the implementation of Kalman updates on the linearised model, a technique named extended Kalman filtering (EKF). For a more complete presentation of Bayesian and Kalman filtering, please refer to this appendix. On the currently available data, we find that the optical flow estimates are very informative and accurate, making this approximation sufficient. For completeness, we present here an SMC-based solution and discuss the empirical differences and use-cases where the latter might be a more relevant choice.
In any case, the state space model naturally accounts for missing observations, as the contribution of \(\Delta_k\) in every transition ensures that each filter can cope with arbitrary inter-frame motion to keep track of its target.
Generating potential object tracks#
The full MOT algorithm consists of a set of single-object trackers following the previous model, but each provided with distinct observations at every frame. These separate filters provide track proposals for every object detected in the video.
Data association using confidence regions#
Throughout the video, depending on various conditions on the incoming detections, existing trackers must be updated (with or without a new observation) and others might need to be created. This setup requires a third party data association block to link the incoming detections with the correct filters.
At the frame \(n\), a set of \(L_n\) Bayesian filters track previously seen objects and a new set of detections \(\mathcal{D}_n\) is provided by the detector. Denote by \(1 \leq \ell \leq L_n\) the index of each filter at time \(n\), and by convention write \(Z^\ell_{1:n-1}\) the previous observed positions associated with index \(\ell\) (even if no observation is available at some past times for that object). Let \(\rho \in (0,1)\) be a confidence level.
For every detected object \(z_n^i \in \detectset_n\) and every filter \(\ell\), compute \(P(i,\ell) = \prob(Z_n^\ell \in V_\delta(z_n^i)\mid Z^\ell_{1:n-1})\) where \(V_\delta(z)\) is the neighborhood of \(z\) defined as the squared area of width \(2\delta\) centered on \(z\) (see this appendix for exact computations).
Using the Hungarian algorithm [40], compute the assignment between detections and filters with \(P\) as cost function, but discarding associations \((i,\ell)\) having \(P(i,\ell) < \rho\). Formally, \(\rho\) represents the level of a confidence region centered on detections and we use \(\rho = 0.5\). Denote \(a_{\rho}\) the resulting assignment map defined as \(a_{\rho}(i) = \ell\) if \(z_n^i\) was associated with the \(\ell\)-th filter, and \(a_{\rho}(i) = 0\) if \(z_n^i\) was not associated with any filter.
For \(1 \leq i \leq D_n\), if \(a_{\rho}(i) = \ell\), use \(z_n^i\) as a new observation to update the \(\ell\)-th filter. If \(a_{\rho}(i) = 0\), create a new filter initialized from the prior distribution, i.e. sample the true location as a Gaussian random variable with mean \(z_n^i\) and variance \(R\).
For all filters \(\ell'\) which were not provided a new observation, update only the predictive law of \(X^{\ell'}_{n}\) given \(Z^{\ell'}_{1:n-1}\).
In other words, we seek to associate filters and detections by maximising a global cost built from the predictive distributions of the available filters, but an association is only valid if its corresponding predictive probability is high enough. Though the Hungarian algorithm is a very popular algorithm in MOT, it is often used with the Euclidean distance or an Intersection-over-Union (IoU) criterion. Using confidence regions for the distributions of \(Z_n\) given \(Z_{1:(n - 1)}\) instead allows to naturally include uncertainty in the decision process. Note that we deactivate filters whose posterior mean estimates lie outside the image subspace in \(\Rset^2\).
A visual depiction of the entire pipeline (from detection to final association) is provided below. This way of combining a set of Bayesian filters with a data association step that resorts on the most likely hypothesis is a form of Global Nearest Neighbor (GNN) tracking. Another possibility is to perform multi-target filtering by including the data association step directly into the probabilistic model, as in [41]. A generalisation of single-target recursive Bayesian filtering, this class of methods is grounded in the point process literature and well motivated theoretically. In case of strong false positive detection rates, close and/or reappearing objects, practical benefits may be obtained from these solutions. Finally, note that another well-motivated choice for \(P(i,\ell)\) could be to use the marginal likelihood \(\prob(Z_n^\ell \in V_\delta(z_n^i))\), which is standard in modern MOT.
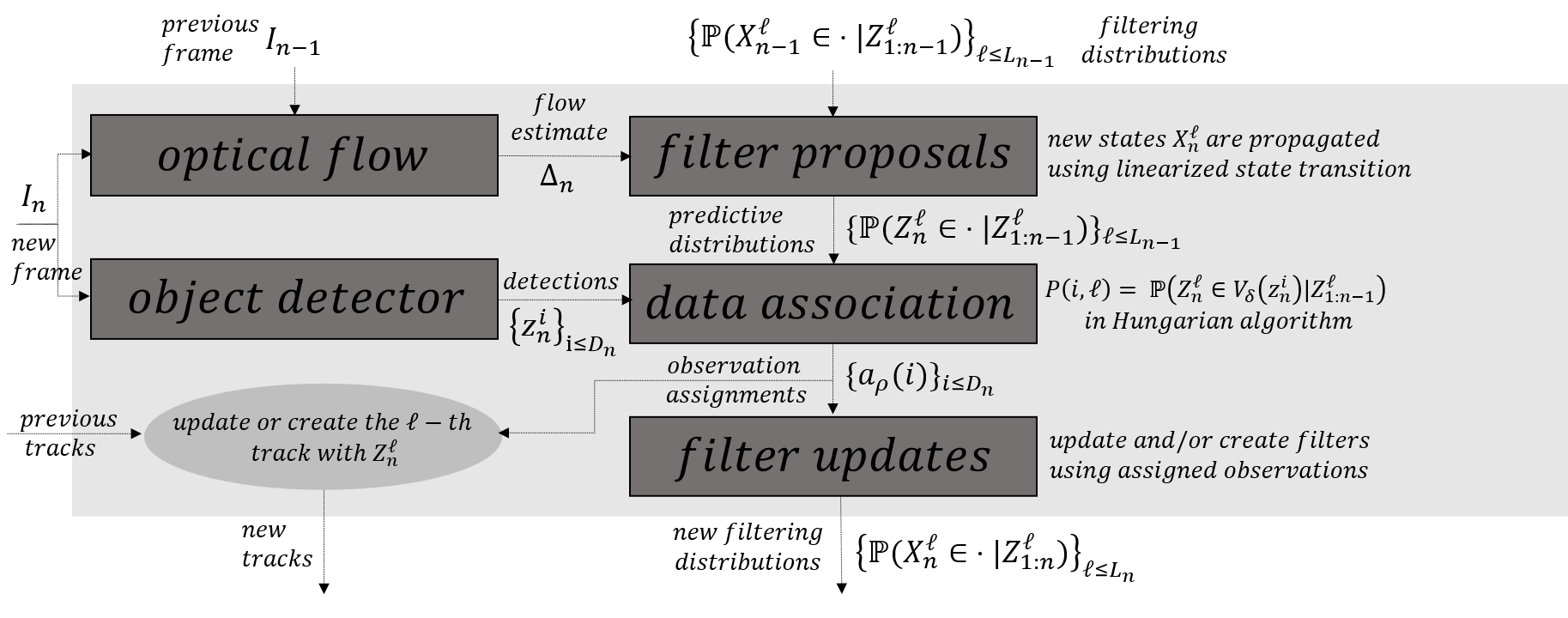
Fig. 3 Visual representation of the tracking pipeline.#
Counting#
At the end of the video, the previous process returns a set of candidate tracks. For counting purposes, we find that simple heuristics can be further applied to filter out tracks that do not follow actual objects. More precisely, we observe that tracks of real objects usually contain more (i) observations and (ii) streams of uninterrupted observations. Denote by \(T_\ell = \left\{n \in \mathbb{N} \mid \exists z \in \detectset_n, Z_n^{\ell} = z\right\}\) all timesteps where the \(\ell\)-th object is observed. To discard false counts according to (i) and (ii), we compute the moving average \(M_\ell^\kappa\) of \(1_{T_\ell}\) using windows of size \(\kappa\), i.e. the sequence defined by \(M_\ell^\kappa[n] = \frac{1}{\kappa} \sum_{k \in [\![n - \kappa, n + \kappa]\!]} 1_{T_\ell}[k]\). We then build \(T_\ell^\kappa = \left\{n \in T_\ell \mid M_\ell^\kappa[n] > \nu\right\}\), and defining \(\mathcal{N} = \left\{\ell \mid |T_\ell^\kappa| > \tau\right\}\), the final object count is \(|\mathcal{N}|\). We choose \(\nu = 0.6\) while \(\kappa,\tau\) are optimized for best count performance (see here for a more comprehensive study).
Metrics for MOT-based counting#
Counting in videos using embedded moving cameras is not a common task, and as such it requires a specific evaluation protocol to understand and compare the performance of competing methods. First, not all MOT metrics are relevant, even if some do provide insights to assist evaluation of count performance. Second, considering only raw counts on long videos gives little information on which of the final counts effectively arise from well detected objects.
Count metrics#
Denoting by \(\hatN\) and \(\N\) the respective predicted and ground truth counts for the validation material, the error \(\hatN - \N\) is misleading as no information is provided on the quality of the predicted counts. Additionally, results on the original validation footage do not measure the statistical variability of the proposed estimators.
Count decomposition#
Define \(\gtlabels\) and \(\predlabels\) the labels of the annotated ground truth tracks and the predicted tracks, respectively. At evaluation, we assign each predicted track to either none or at most one ground truth track, writing \(j \rightarrow \emptyset\) or \(j \rightarrow i\) for the corresponding assignments. The association is made whenever a predicted track \(i\) overlaps with a ground truth track \(j\) at any frame, i.e. for a given frame a detection in \(i\) is within a threshold \(\alpha\) of an object in \(j\). We compute metrics for 20 values of \(\alpha \in [0.05 \alpha_{max}, 0.95 \alpha_{max}]\), with \(\alpha_{max} = 0.1 \sqrt{w^2 + h^2}\), then average the results, which is the default method in HOTA to combine results at different thresholds. We keep this default solution, in particular because our results are very consistent accross different thresholds in that range (we only observe a slight decrease in performance for \(\alpha = \alpha_{max}\), where occasional false detections probably start to lie below the threshold).
Denote \(A_i = \{\predlabels \mid j \rightarrow i\}\) the set of predicted tracks assigned to the \(i\)-th ground truth track. We define:
\(\Ntrue = \sum_{i=1}^{\N} 1_{|A_i| > 0}\) the number of ground truth objects successfully counted.
\(\Nred = \sum_{i=1}^{\N} |A_i| - \Ntrue\) the number of redundant counts per ground truth object.
\(\Nmis = \N - \Ntrue\) the number of ground truth objects that are never effectively counted.
\(\Nfalse = \sum_{j=1}^{\hatN} 1_{j \rightarrow \emptyset}\) the number of counts which cannot be associated with any ground truth object and are therefore considered as false counts.
Using these metrics provides a much better understanding of \(\hatN\) as
while \(\Nmis\) completely summarises the number of undetected objects.
Conveniently, the quantities can be used to define the count precision (\(\countpr\)) and count recall (\(\countre\)) as follows:
which provide good summaries for the overall count quality, letting aside the tracking performance.
Note that these metrics and the associated decomposition are only defined if the previous assignment between predicted and ground truth tracks can be obtained. In our case, predicted tracks never overlap with several ground truth tracks (because true objects are well separated), and therefore this assignment is straightforward. More involved metrics have been studied at the trajectory level (see for example [44] and the references therein), though not specifically tailored to the restricted task of counting. For more complicated data, an adaptation of such contributions into proper counting metrics could be valuable.
Statistics#
Since the original validation set comprises only a few unequally long videos, only absolute results are available. Splitting the original sequences into shorter independent sequences of equal length allows to compute basic statistics. For any quantity \(\hatN_\bullet\) defined above, we provide \(\hat{\sigma}_{\hatN_\bullet}\) the associated empirical standard deviations computed on the set of short sequences.
Experiments#
We denote by \(S_1\), \(S_2\) and \(S_3\) the three river sections of the evaluation material and split the associated footage into independent segments of 30 seconds. We further divide this material into two distinct validation (6min30) and test (7min) splits.
To demonstrate the benefits of our work, we select two multi-object trackers and build competing counting systems from them. Our first choice is SORT [26], which relies on Kalman filtering with velocity updated using the latest past estimates of object positions. Similar to our system, it only relies on image supervision for training, and though DeepSORT [29] is a more recent alternative with better performance, the associated deep appearance network cannot be used without additional video annotations. FairMOT [30], a more recent alternative, is similarly intended for use with video supervision but allows self-supervised training using only an image dataset. Built as a new baseline for MOT, it combines linear constant-velocity Kalman filtering with visual features computed by an additional network branch and extracted at the position of the estimated object centers, as introduced in CenterTrack [45]. We choose FairMOT to compare our method to a solution based on deep visual feature extraction.
Similar to our work, FairMOT uses CenterNet for the detection part and the latter is therefore trained as in Training. We train it using hyperparameters from the original paper. The detection outputs are then shared between all counting methods, allowing fair comparison of counting performance given a fixed object detector. We run all experiments at 12fps, an intermediate framerate to capture all objects while reducing the computational burden.
Detection#
In the following section, we present the performance of the trained detector. Having annotated all frames of the evaluation videos, we directly compute \(\detre\) and \(\detpr\) on those instead of a test split of the image dataset used for training. This allows realistic assessment of the detection quality of our system on true videos that may include blurry frames or artifacts caused by strong motion. We observe low \(\detre\), suggesting that objects are only captured on a fraction of the frames they appear on. To better focus on count performance in the next sections, we remove segments that do not generate any correct detection: performance on the remaining footage is increased and given by \(\detre^{*}\) and \(\detpr^{*}\).
| DetRe* | DetPr* | |
|---|---|---|
| S1 | 37.2 | 60.7 |
| S2 | 29.4 | 38.2 |
| S3 | 35.1 | 53.6 |
| All | 35.5 | 55.1 |
Counts#
To fairly compare the three solutions, we calibrate the hyperparameters of our postprocessing block on the validation split and keep the values that minimize the overall count error \(\hatN\) for each of them separately (see this appendix for more information). All methods are found to work optimally at \(\kappa = 7\), but our solution requires \(\tau = 8\) instead of \(\tau = 9\) for other solutions: this lower level of thresholding suggests that raw output of our tracking system is more reliable.
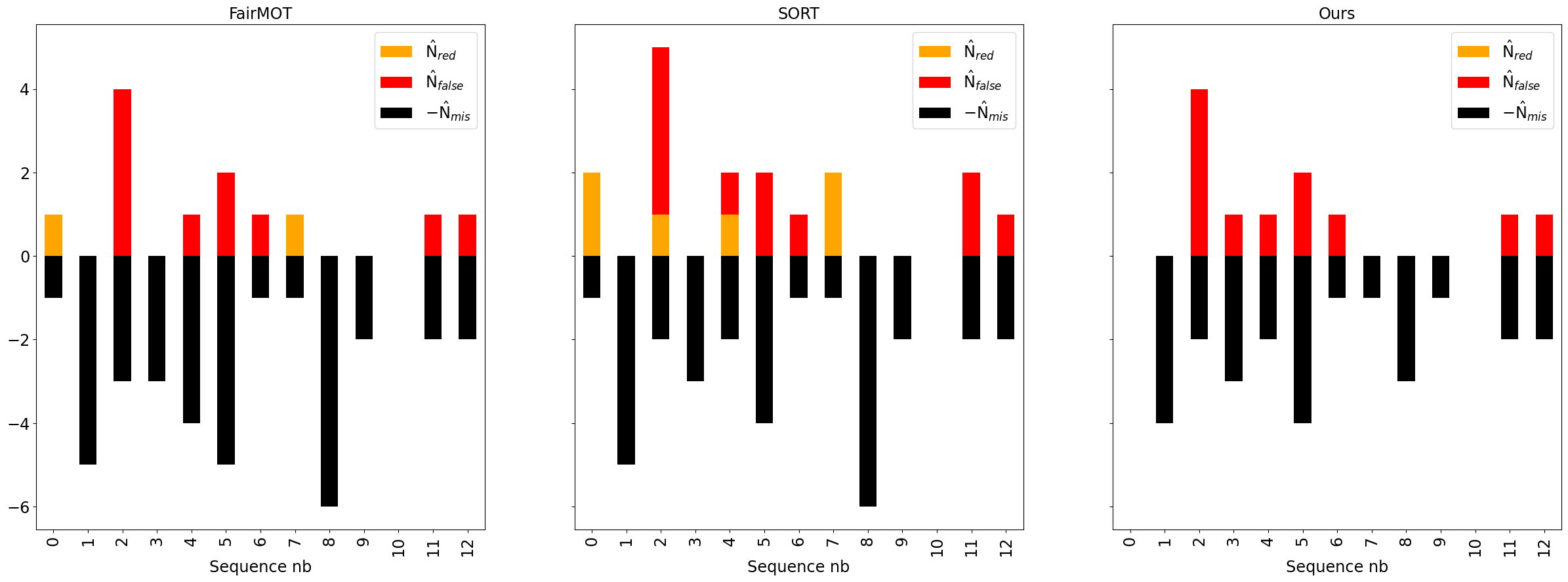
We report results using the count-related tracking metrics and count decompositions defined in the previous section. To provide a clear but thorough summary of the performance, we report \(\assre\), \(\countre\) and \(\countpr\) as tabled values (the first gives a simple overview of the quality of the predicted tacks while the latter two concisely summarise the count performance). For a more detailed visualisation of the different types of errors, we plot the count error decomposition for all sequences in a separate graph. Note that across all videos and all methods, we find \(\asspr\) between 98.6 and 99.2 which shows that this application context is unconcerned with tracks spanning multiple ground truth objects, therefore we do not conduct a more detailed interpretation of \(\asspr\) values.
First, the higher values of AssRe confirm the robustness of our solution in assigning consistent tracks to individual objects. This is directly reflected into the count precision performance - with an overall value of \(\countpr\) 17.6 points higher than the next best method (SORT) - or even more so in the complete disappearance of orange (redundant) counts in the graph. A key aspect is that these improvements are not counteracted by a lower \(\countre\): on the contrary, our tracker, which is more stable, also captures more object (albeit still missing most of them, with a \(\countre\) below 50%). Note finally, that the strongest improvements are obtained for sequence 2 which is also the part with the strongest motion.
Sequence 1#
\(\mathsf{AssRe}\) |
\(\mathsf{CountRe}\) |
\(\hat{\sigma}_\mathsf{CountRe}\) |
\(\mathsf{CountPr}\) |
\(\hat{\sigma}_\mathsf{CountPr}\) |
|
|---|---|---|---|---|---|
FairMOT |
62.0 |
31.2 |
25.6 |
52.6 |
24.6 |
Sort |
65.6 |
43.8 |
26.4 |
53.8 |
20.2 |
Ours |
79.5 |
50.0 |
27.9 |
64.0 |
23.8 |
Sequence 2#
\(\mathsf{AssRe}\) |
\(\mathsf{CountRe}\) |
\(\hat{\sigma}_\mathsf{CountRe}\) |
\(\mathsf{CountPr}\) |
\(\hat{\sigma}_\mathsf{CountPr}\) |
|
|---|---|---|---|---|---|
FairMOT |
8.7 |
12.5 |
35.4 |
50.0 |
0.0 |
Sort |
20.7 |
12.5 |
35.4 |
33.3 |
0.0 |
Ours |
72.7 |
50.0 |
0.0 |
100.0 |
0.0 |
Sequence 3#
\(\mathsf{AssRe}\) |
\(\mathsf{CountRe}\) |
\(\hat{\sigma}_\mathsf{CountRe}\) |
\(\mathsf{CountPr}\) |
\(\hat{\sigma}_\mathsf{CountPr}\) |
|
|---|---|---|---|---|---|
FairMOT |
17.4 |
25.0 |
47.1 |
50.0 |
50.0 |
Sort |
19.6 |
25.0 |
47.1 |
40.0 |
50.9 |
Ours |
24.6 |
37.5 |
41.7 |
60.0 |
47.9 |
Combined sequences#
\(\mathsf{AssRe}\) |
\(\mathsf{CountRe}\) |
\(\hat{\sigma}_\mathsf{CountRe}\) |
\(\mathsf{CountPr}\) |
\(\hat{\sigma}_\mathsf{CountPr}\) |
|
|---|---|---|---|---|---|
FairMOT |
56.7 |
27.1 |
31.6 |
52.0 |
30.2 |
Sort |
59.8 |
35.4 |
32.7 |
50.0 |
30.2 |
Ours |
76.0 |
47.9 |
28.8 |
67.6 |
32.0 |
Detailed results on individual segments#
Practical impact and future goals#
We successfully tackled video object counting on river banks, in particular issues which could be addressed independently of detection quality. Moreover the methodology developed to assess count quality enables us to precisely highlight the challenges that pertain to video object counting on river banks. Conducted in coordination with Surfrider Foundation Europe, an NGO specialized on water preservation, our work marks an important milestone in a broader campaign for macrolitter monitoring and is already being used in a production version of a monitoring system. That said, large amounts of litter items are still not detected. Solving this problem is largely a question of augmenting the object detector training dataset through crowdsourced images. A specific annotation platform is online, thus the amount of annotated images is expected to continuously increase, while training is provided to volunteers collecting data on the field to ensure data quality. Finally, several expeditions on different rivers are already underway and new video footage is expected to be annotated in the near future for better evaluation. All data is made freely available. Future goals include downsizing the algorithm, a possibility given the architectural simplicity of anchor-free detection and the relatively low computational complexity of EKF. In a citizen science perspective, a fully embedded version for portable devices will allow a larger deployment. The resulting field data will help better understand litter origin, allowing to model and predict litter density in non surveyed areas. Correlations between macro litter density and environmental parameters will be studied (e.g., population density, catchment size, land use and hydromorphology). Finally, our work naturally benefits any extension of macrolitter monitoring in other areas (urban, coastal, etc) that may rely on a similar setup of moving cameras.
Supplements#
Details on the image dataset#
Categories#
In this work, we do not seek to precisely predict the proportions of the different types of counted litter. However, we build our dataset to allow classification tasks. Though litter classifications built by experts already exist, most are based on semantic rather than visual features and do not particularly consider the problem of class imbalance, which makes statistical learning more delicate. In conjunction with water pollution experts, we therefore define a custom macrolitter taxonomy which balances annotation ease and pragmatic decisions for computer vision applications. This classification, depicted in Fig. 4 can be understood as follows.
We define a set of frequently observed classes that annotateors can choose from, divided into:
Classes for rigid and easily recognisable items which are often observed and have definite shapes
Classes for fragmented objects which are often found along river banks but whose aspects are more varied
We define two supplementary categories used whenever the annotater cannot classify the item they are observing in an image using classes given in 1.
A first category is used whenever the item is clearly identifiable but its class is not proposed. This will ensure that our classification can be improved in the future, as images with items in this category will be checked regularly to decide whether a new class needs to be created.
Another category is used whenever the annotater does not understand the item they are seeing. Images containing items denoted as such will not be used for applications involving classification.
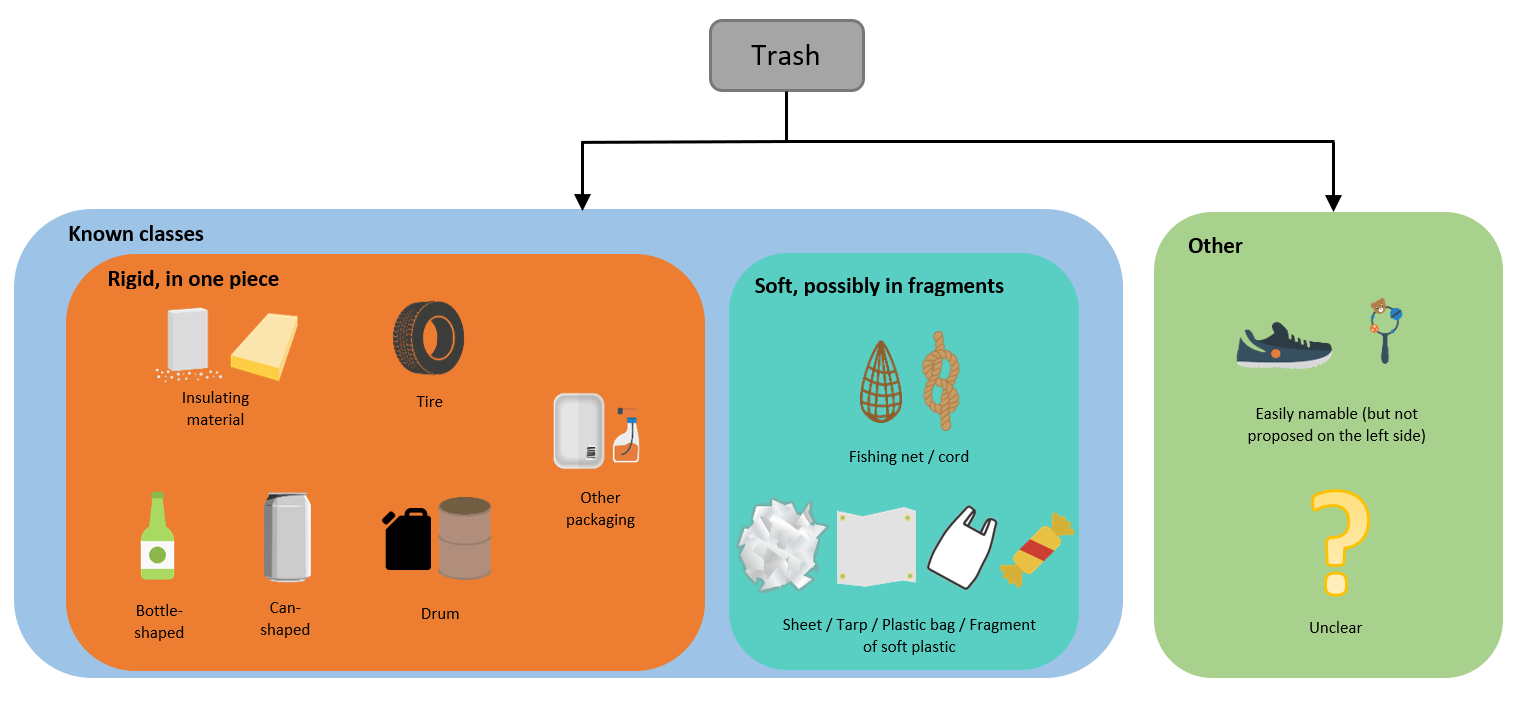
Fig. 4 Trash categories defined to facilitate porting to a counting system that allows trash identification#
Details on the evaluation videos#
River segments#
In this section, we provide further details on the evaluation material. Fig. 5 shows the setup and positioning of the three river segments \(S_1\), \(S_2\) and \(S_3\) used to evaluate the methods. The segments differ in the following aspects.
Segment 1: Medium current, high and dense vegetation not obstructing vision of the right riverbank from watercrafts, extra objects installed before the field experiment.
Segment 2: High current, low and dense vegetation obstructing vision of the right riverbank from watercrafts.
Segment 3: Medium current, high and little vegetation not obstructing vision of the left riverbank from watercrafts.
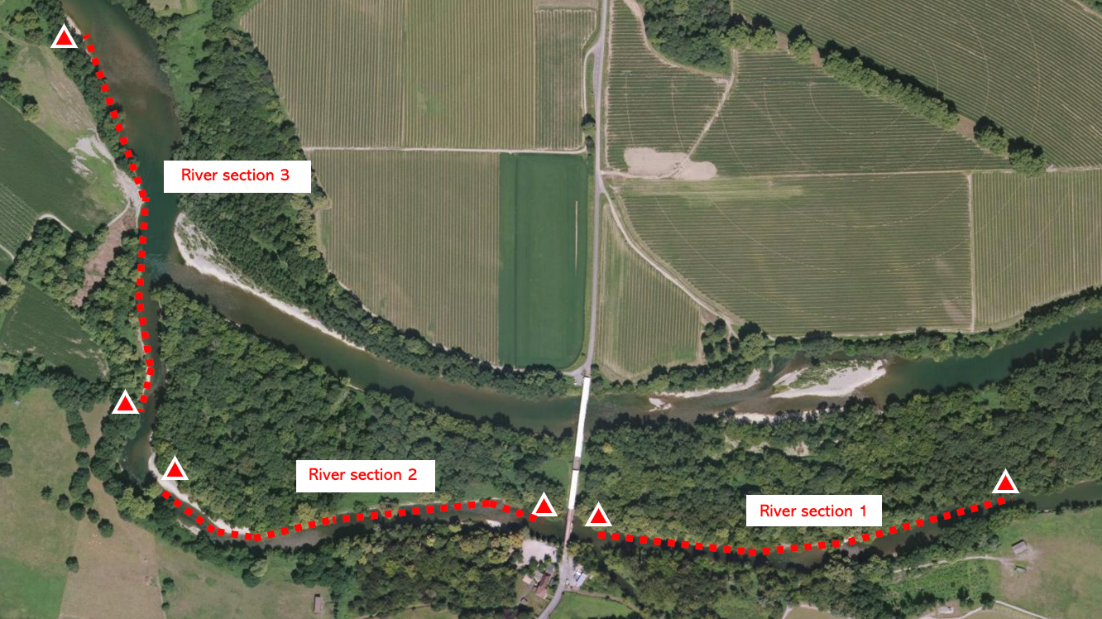
Fig. 5 Aerial view of the three river segments of the evaluation material#
Track annotation protocol#
To annotate tracks on the evaluation sequences, we used the online tool “CVAT” which allows to locate bounding boxes on video frames and propagate them in time. The following items provide further details on the exact annotation process.
Object tracks start whenever a litter item becomes fully visible and identifiable by the naked eye.
Positions and sizes of objects are given at nearly every second of the video with automatic interpolation for frames in-between: this yields clean tracks with precise positions at 24fps.
We do not provide inferred locations when an object is fully occluded, but tracks restart with the same identity whenever the object becomes visible again.
Tracks stop whenever an object becomes indistinguishable and will not reappear again.
Implementation details for the tracking module#
Covariance matrices for state and observation noises#
In our state space model, \(Q\) models the noise associated with the movement model we posit in Bayesian tracking with optical flow involving optical flow estimates, while \(R\) models the noise associated with the observation of the true position via our object detector. An attempt to estimate the diagonal values of these matrices was the following.
To estimate \(R\), we computed a mean \(L_2\) error between the known positions of objects and the associated predictions by the object detector, for images in our training dataset.
To estimate \(Q\), we built a small synthetic dataset of consecutive frames taken from videos, where positions of objects in two consecutive frames are known. We computed a mean \(L_2\) error between the known positions in the second frame and the positions estimated by shifting the positions in the first frame with the estimated optical flow values.
This led to \(R_{00} = R_{11} = 1.1\), \(Q_{00} = 4.7\) and \(Q_{11} = 0.9\), for grids of dimensions \(\lfloor w/p\rfloor \times \lfloor h/p\rfloor = 480 \times 270\). All other coefficients were not estimated and supposed to be 0.
An important remark is that though we use these values in practice, we found that tracking results are largely unaffected by small variations of \(R\) and \(Q\). As long as values are meaningful relative to the image dimensions and the size of the objects, most noise levels show relatively similar performance.
Influence of \(\tau\) and \(\kappa\)#
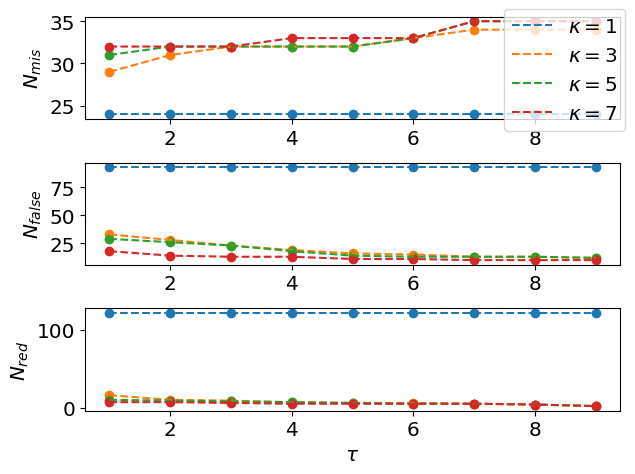
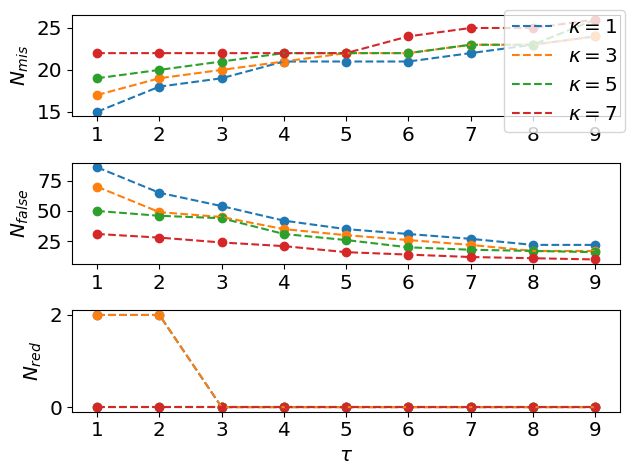
An understanding of \(\kappa\), \(\tau\) and \(\nu\) can be stated as follows. For any track, given a value for \(\kappa\) and \(\nu\), an observation at time \(n\) is only kept if there are also \(\nu \cdot \kappa\) observations in the temporal window of size \(\kappa\) that surrounds \(n\) (windows are centered around \(n\) except at the start and end of the track). The track is only counted if the remaining number of observations is strictly higher than \(\tau\). At a given \(\nu > 0.5\), \(\kappa\) and \(\tau\) should ideally be chosen to jointly decrease \(\Nfalse\) and \(\Nred\) as much as possible without increasing \(\Nmis\) (true objects become uncounted if tracks are discarded too easily).
In the following code cell, we plot the error decomposition of the counts for several values of \(\kappa\) and \(\tau\) with \(\nu=0.6\) for the outputs of the three different trackers. We choose \(\nu = 0.7\) and compute the optimal point as the one which minimizes the overall count error \(\hatN (= \Nmis + \Nred + \Nfalse)\).
Best parameters for FairMOT: (kappa, tau) = (7, 9)
Best parameters for SORT: (kappa, tau) = (7, 9)
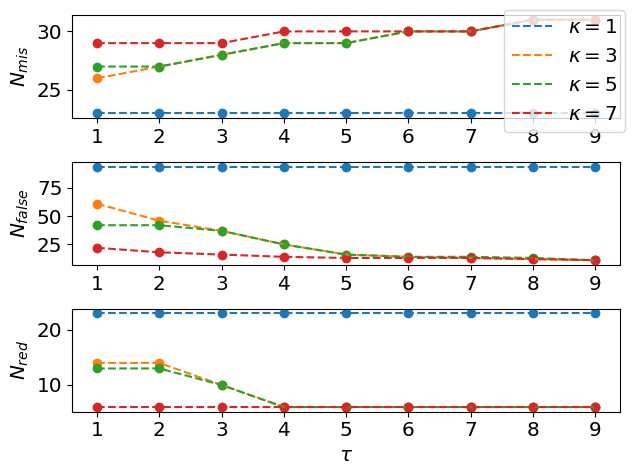
Best parameters for Ours: (kappa, tau) = (7, 8)
Bayesian filtering#
Considering a state space model with \((X_k, Z_k)_{k \geq 0}\) the random processes for the states and observations, respectively, the filtering recursions are given by:
The predict step: \(p(x_{k+1}|z_{1:k}) = \int p(x_{k+1}|x_k)p(x_k|z_{1:k})\mathrm{d}x_k.\)
The update step: \(p(x_{k+1}|z_{1:k+1}) \propto p(z_{k+1} | x_{k+1})p(x_{k+1}|z_{1:k}).\)
The recursions are intractable in most cases, but when the model is linear and Gaussian, i.e. such that:
with \(\eta_k \sim \mathcal{N}(0,Q_k)\) and \(\epsilon_k \sim \mathcal{N}(0,R_k)\), then the distribution of \(X_k\) given \(Z_{1:k}\) is a Gaussian \(\mathcal{N}(\mu_k,\Sigma_k)\) following:
\(\mu_{k|k-1} = A_k\mu_{k-1} + a_k\) and \(\Sigma_{k|k-1} = A_k \Sigma_{k-1} A_k^T + Q_k\) (Kalman predict step),
\(\mu_{k} = \mu_{k|k-1} + K_k\left[Z_k - (B_k\mu_{k|k-1} + b_k)\right]\) and \(\Sigma_{k} = (I - K_kB_k)\Sigma_{k|k-1}\) (Kalman update step),
where \(K_k = \Sigma_{k|k-1}B_k^T(B_k \Sigma_{k|k-1} B_k^T + R_k)^{-1}\).
In the case of the linearized model in State space model, EKF consists in applying these updates with:
Computing the confidence regions#
In words, \(P(i,\ell)\) is the mass in \(V_\delta(z_n^i) \subset \Rset^2\) of the probability distribution of \(Z_n^\ell\) given \(Z_{1:n-1}^\ell\). It is related to the filtering distribution at the previous timestep via
When using EKF, this distribution is a multivariate Gaussian whose moments can be analytically obtained from the filtering mean and variance and the parameters of the linear model, i.e.
and
following the previously introduced notation. Note that given the values of \(A_k, B_k, a_k, b_k\) in our model these equations are simplified in practice, e.g. \(B_k = I, b_k = 0\) and \(A_k \mu_{k-1} + a_k = \mu_{k-1} + \Delta_k(\lfloor \mu_{k-1} \rfloor)\).
In \(\Rset^2\), values of the cumulative distribution function (cdf) of a multivariate Gaussian distribution are easy to compute. Denote with \(F_n^\ell\) the cdf of \(\predictdist_n^\ell\). If \(V_\delta(z)\) is a squared neighborhood of size \(\delta\) and centered on \(z=(x,y) \in \Rset^2\), then, denoting with \(\predictdist_n^\ell\) the distribution of \(Z_n^\ell\) given \(Z_{1:n-1}^\ell\):
This allows easy computation of \(P(i,\ell) = \predictdist_n^\ell(V_\delta(z_n^i))\).
Impact of the filtering algorithm#
An advantage of the data association method proposed in Data association using confidence regions is that it is very generic and does not constrain the tracking solution to any particular choice of filtering algorithm. As for EKF, UKF implementations are already available to compute the distribution of \(Z_k\) given \(Z_{1:k-1}\) and the corresponding confidence regions (see the section above). We propose a solution to compute this distribution when SMC is used, and performance comparisons between the EKF, UKF and SMC versions of our trackers are discussed.
SMC-based tracking#
Denote \(\filtdist_k\) the filtering distribution (ie. that of \(Z_k\) given \(X_{1:k}\)) for the HMM \((X_k,Z_k)_{k \geq 1}\) (omitting the dependency on the observations for notation ease). Using a set of samples \(\{X_k^i\}_{1 \leq i \leq N}\) and importance weights \(\{w_k^i\}_{1 \leq i \leq N}\), SMC methods build an approximation of the following form:
Contrary to EKF and UKF, the distribution \(\mathbb{L}_k\) of \(Z_k\) given \(Z_{1:k-1}\) is not directly available but can be obtained via an additional Monte Carlo sampling step. Marginalizing over \((X_{k-1}\), \(X_k)\) and using the conditional independence properties of HMMs, we decompose \(\mathbb{L}_k\) using the conditional state transition \(\transdist_k(x,\rmd x')\) and the likelihood of \(Z_k\) given \(X_k\), denoted by \(\likel_k(x, \rmd z)\):
Replacing \(\filtdist_{k-1}\) with \(\SMCfiltdist_{k-1}\) into the previous equation yields
In our model, the state transition is Gaussian and therefore easy to sample from. Thus an approximated predictive distribution \(\MCpredictdist_k\) can be obtained using Monte Carlo estimates built from random samples \(\{X_k^{i,j}\}_{1 \leq i \leq N}^{1 \leq j \leq M}\) drawn from \(\transdist_k(X_{k-1}^i, \rmd x_k)\). This leads to
Since the observation likelihood is also Gaussian, \(\MCpredictdist_k\) is a Gaussian mixture, thus values of \(\MCpredictdist_k(\mathsf{A})\) for any \(\mathsf{A} \subset \Rset^2\) can be computed by applying the tools from the section above to all mixture components. Similar to EKF and UKF, this approximated predictive distribution is used to recover object identities via \(\MCpredictdist_n^{\ell}(V_\delta(z_n^i))\) computed for all incoming detections \(\detectset_n = \{z_n^i\}_{1 \leq i \leq D_n}\) and each of the \(1 \leq \ell \leq L_n\) filters, where \(\MCpredictdist_n^{\ell}\) is the predictive distribution associated with the \(\ell\)-th filter.
Performance comparison#
In theory, sampling-based methods like UKF and SMC are better suited for nonlinear state space models like the one we propose in State space model. However, we observe very few differences in count results when upgrading from EKF to UKF to SMC. In practise, there is no difference at all between our EKF and UKF implementations, which show strictly identical values for \(\Ntrue\), \(\Nfalse\) and \(\Nred\). For the SMC version, values for \(\Nfalse\) and \(\Nred\) improve by a very small amount (2 and 1, respectively), but \(\Nmis\) is slightly worse (one more object missed), and these results depend loosely on the number of samples used to approximate the filtering distributions and the number of samples for the Monte Carlo scheme. Therefore, our motion estimates via the optical flow \(\Delta_n\) prove very reliable in our application context, so much that EKF, though suboptimal, brings equivalent results. This comforts us into keeping it as a faster and computationally simpler option. That said, this conclusion might not hold in scenarios where camera motion is even stronger, which was our main motivation to develop a flexible tracking solution and to provide implementations of UKF and SMC versions. This allows easier extension of our work to more challenging data.
Roland Geyer, Jenna Jambeck, and Kara Law. Production, use, and fate of all plastics ever made. Science Advances, 3:e1700782, 07 2017. doi:10.1126/sciadv.1700782.
Natalie Welden. The environmental impacts of plastic pollution. pages 195–222, 01 2020. doi:10.1016/B978-0-12-817880-5.00008-6.
Thushari Gamage and J.D.M. Senevirathna. Plastic pollution in the marine environment. Heliyon, 6:e04709, 08 2020. doi:10.1016/j.heliyon.2020.e04709.
Chelsea Rochman, Anthony Andrady, Sarah Dudas, Joan Fabres, François Galgani, Denise lead, Valeria Hidalgo-Ruz, Sunny Hong, Peter Kershaw, Laurent Lebreton, Amy Lusher, Ramani Narayan, Sabine Pahl, James Potemra, Chelsea Rochman, Sheck Sherif, Joni Seager, Won Shim, Paula Sobral, and Linda Amaral-Zettler. Sources, fate and effects of microplastics in the marine environment: part 2 of a global assessment. pages, 12 2016.
Jenna Jambeck, Roland Geyer, Chris Wilcox, Theodore Siegler, Miriam Perryman, Anthony Andrady, Ramani Narayan, and Kara Law. Marine pollution. plastic waste inputs from land into the ocean. Science (New York, N.Y.), 347:768–771, 02 2015. doi:10.1126/science.1260352.
Antoine Bruge, Cristina Barreau, Jérémy Carlot, Hélène Collin, Clément Moreno, and Philippe Maison. Monitoring litter inputs from the Adour river (southwest France) to the marine environment. Journal of Marine Science and Engineering, 2018. doi:10.3390/jmse6010024.
D. González-Fernández, A. Cózar, G. Hanke, J. Viejo, C. Morales-Caselles, R. Bakiu, D. Barcelo, F. Bessa, Antoine Bruge, M. Cabrera, J. Castro-Jiménez, M. Constant, R. Crosti, Yuri Galletti, A. Kideyş, N. Machitadze, Joana Pereira de Brito, M. Pogojeva, N. Ratola, J. Rigueira, E. Rojo-Nieto, O. Savenko, R. I. Schöneich-Argent, G. Siedlewicz, Giuseppe Suaria, and Myrto Tourgeli. Floating macrolitter leaked from europe into the ocean. Nature Sustainability, 4:474 – 483, 2021.
Johnny Gasperi, Rachid Dris, Tiffany Bonin, Vincent Rocher, and Bruno Tassin. Assessment of floating plastic debris in surface water along the seine river. Environmental Pollution, 195:163 – 166, 2014. URL: http://www.sciencedirect.com/science/article/pii/S0269749114003807, doi:https://doi.org/10.1016/j.envpol.2014.09.001.
David Morritt, Paris V. Stefanoudis, Dave Pearce, Oliver A. Crimmen, and Paul F. Clark. Plastic in the thames: a river runs through it. Marine Pollution Bulletin, 78(1):196–200, 2014. URL: https://www.sciencedirect.com/science/article/pii/S0025326X13006565, doi:https://doi.org/10.1016/j.marpolbul.2013.10.035.
Tim van Emmerik, Romain Tramoy, Caroline van Calcar, Soline Alligant, Robin Treilles, Bruno Tassin, and Johnny Gasperi. Seine Plastic Debris Transport Tenfolded During Increased River Discharge. Frontiers in Marine Science, 6(October):1–7, 2019. doi:10.3389/fmars.2019.00642.
Tim van Emmerik and Anna Schwarz. Plastic debris in rivers. WIREs Water, 7(1):e1398, 2020. URL: https://onlinelibrary.wiley.com/doi/abs/10.1002/wat2.1398, arXiv:https://onlinelibrary.wiley.com/doi/pdf/10.1002/wat2.1398, doi:https://doi.org/10.1002/wat2.1398.
Pedro F Proença and Pedro Simões. TACO: Trash Annotations in Context for Litter Detection. 2020. URL: http://tacodataset.org/ http://arxiv.org/abs/2003.06975, arXiv:2003.06975.
Gioele Ciaparrone, Francisco Luque Sánchez, Siham Tabik, Luigi Troiano, Roberto Tagliaferri, and Francisco Herrera. Deep learning in video multi-object tracking: A survey. Neurocomputing, 381:61–88, 2020. arXiv:1907.12740, doi:10.1016/j.neucom.2019.11.023.
P. Bergmann, T. Meinhardt, and L. Leal-Taixe. Tracking without bells and whistles. In 2019 IEEE/CVF International Conference on Computer Vision (ICCV), volume, 941–951. Los Alamitos, CA, USA, nov 2019. IEEE Computer Society. URL: https://doi.ieeecomputersociety.org/10.1109/ICCV.2019.00103, doi:10.1109/ICCV.2019.00103.
Jonathon Luiten, Aljosa Osep, Patrick Dendorfer, Philip Torr, Andreas Geiger, Laura Leal-Taixé, and Bastian Leibe. Hota: a higher order metric for evaluating multi-object tracking. International journal of computer vision, 129(2):548–578, 2021.
Prithvijit Chattopadhyay, Ramakrishna Vedantam, Ramprasaath R Selvaraju, Dhruv Batra, and Devi Parikh. Counting everyday objects in everyday scenes. In Proceedings - 30th IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, volume 2017-Janua, 4428–4437. 2017. arXiv:1604.03505, doi:10.1109/CVPR.2017.471.
Carlos Arteta, Victor Lempitsky, and Andrew Zisserman. Counting in the wild. 9911:483–498, 10 2016. doi:10.1007/978-3-319-46478-7_30.
Xingjiao Wu, Baohan Xu, Yingbin Zheng, Hao Ye, Jing Yang, and Liang He. Fast video crowd counting with a temporal aware network. Neurocomputing, 403:13–20, 2020. URL: https://www.sciencedirect.com/science/article/pii/S0925231220306561, doi:https://doi.org/10.1016/j.neucom.2020.04.071.
Feng Xiong, Xingjian Shi, and Dit-Yan Yeung. Spatiotemporal modeling for crowd counting in videos. In 2017 IEEE International Conference on Computer Vision (ICCV), volume, 5161–5169. 2017. doi:10.1109/ICCV.2017.551.
Yunqi Miao, Jungong Han, Yongsheng Gao, and Baochang Zhang. ST-CNN: Spatial-Temporal Convolutional Neural Network for crowd counting in videos. Pattern Recognition Letters, 125:113–118, jul 2019. doi:10.1016/j.patrec.2019.04.012.
Mattis Wolf, Katelijn van den Berg, Shungudzemwoyo Pascal Garaba, Nina Gnann, Klaus Sattler, Frederic Theodor Stahl, and Oliver Zielinski. Machine learning for aquatic plastic litter detection, classification and quantification (APLASTIC–Q). Environmental Research Letters, 2020. doi:10.1088/1748-9326/abbd01.
Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun. Faster r-cnn: towards real-time object detection with region proposal networks. In Proceedings of the 28th International Conference on Neural Information Processing Systems - Volume 1, NIPS'15, 91–99. Cambridge, MA, USA, 2015. MIT Press.
Colin van Lieshout, Kees van Oeveren, Tim van Emmerik, and Eric Postma. Automated River Plastic Monitoring Using Deep Learning and Cameras. Earth and Space Science, 7(8):e2019EA000960, 2020. doi:10.1029/2019EA000960.
Jungseok Hong, Michael Fulton, and Junaed Sattar. A Generative Approach Towards Improved Robotic Detection of Marine Litter. In Proceedings - IEEE International Conference on Robotics and Automation, 10525–10531. 2020. arXiv:1910.04754, doi:10.1109/ICRA40945.2020.9197575.
Wenhan Luo, Junliang Xing, Anton Milan, Xiaoqin Zhang, Wei Liu, and Tae-Kyun Kim. Multiple object tracking: a literature review. Artificial Intelligence, 293:103448, 2021. URL: https://www.sciencedirect.com/science/article/pii/S0004370220301958, doi:https://doi.org/10.1016/j.artint.2020.103448.
Alex Bewley, Zongyuan Ge, Lionel Ott, Fabio Ramos, and Ben Upcroft. Simple online and realtime tracking. In Proceedings - International Conference on Image Processing, ICIP, volume 2016-Augus, 3464–3468. 2016. URL: abewley/sort, arXiv:1602.00763, doi:10.1109/ICIP.2016.7533003.
Holger Caesar, Varun Bankiti, Alex H Lang, Sourabh Vora, Venice Erin Liong, Qiang Xu, Anush Krishnan, Yu Pan, Giancarlo Baldan, and Oscar Beijbom. Nuscenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 11618–11628. 2020. arXiv:1903.11027, doi:10.1109/CVPR42600.2020.01164.
Patrick Dendorfer, Hamid Rezatofighi, Anton Milan, Javen Shi, Daniel Cremers, Ian Reid, Stefan Roth, Konrad Schindler, and Laura Leal-Taixé. MOT20: A benchmark for multi object tracking in crowded scenes. 2020. arXiv:2003.09003.
Nicolai Wojke, Alex Bewley, and Dietrich Paulus. Simple online and realtime tracking with a deep association metric. In Proceedings - International Conference on Image Processing, ICIP, volume 2017-Septe, 3645–3649. 2018. arXiv:1703.07402, doi:10.1109/ICIP.2017.8296962.
Yifu Zhang, Chunyu Wang, Xinggang Wang, Wenjun Zeng, and Wenyu Liu. Fairmot: on the fairness of detection and re-identification in multiple object tracking. International Journal of Computer Vision, pages 1–19, 2021.
Peng Chu, Jiang Wang, Quanzeng You, Haibin Ling, and Zicheng Liu. TransMOT: Spatial-Temporal Graph Transformer for Multiple Object Tracking. 2021. URL: http://arxiv.org/abs/2104.00194, arXiv:2104.00194.
Yongxin Wang, Kris Kitani, and Xinshuo Weng. Joint object detection and multi-object tracking with graph neural networks. May 2021.
Michael Fulton, Jungseok Hong, Md Jahidul Islam, and Junaed Sattar. Robotic detection of marine litter using deep visual detection models. In 2019 International Conference on Robotics and Automation (ICRA), 5752–5758. IEEE, 2019.
Xingyi Zhou, Dequan Wang, and Philipp Krähenbühl. Objects as points. apr 2019. URL: http://arxiv.org/abs/1904.07850, arXiv:1904.07850.
Hei Law and Jia Deng. Cornernet: detecting objects as paired keypoints. In Vittorio Ferrari, Martial Hebert, Cristian Sminchisescu, and Yair Weiss, editors, Computer Vision - ECCV 2018 - 15th European Conference, Munich, Germany, September 8-14, 2018, Proceedings, Part XIV, volume 11218 of Lecture Notes in Computer Science, 765–781. Springer, 2018. URL: https://doi.org/10.1007/978-3-030-01264-9\_45, doi:10.1007/978-3-030-01264-9\_45.
Fisher Yu, Dequan Wang, Evan Shelhamer, and Trevor Darrell. Deep layer aggregation. In 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, volume, 2403–2412. 2018. doi:10.1109/CVPR.2018.00255.
Nikos Paragios, Yunmei Chen, and Olivier D Faugeras. Handbook of mathematical models in computer vision. Springer Science & Business Media, 2006.
G. Farnebäck. Two-frame motion estimation based on polynomial expansion. In Scandinavian conference on Image analysis, 363–370. Springer, 2003.
S. Särkkä. Bayesian Filtering and Smoothing. Cambridge University Press, New York, NY, USA, 2013.
H. W. Kuhn. The hungarian method for the assignment problem. Naval Research Logistics Quarterly, 2(1-2):83–97, 1955. URL: https://onlinelibrary.wiley.com/doi/abs/10.1002/nav.3800020109, arXiv:https://onlinelibrary.wiley.com/doi/pdf/10.1002/nav.3800020109, doi:https://doi.org/10.1002/nav.3800020109.
R.P.S. Mahler. Multitarget bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 39(4):1152–1178, 2003. doi:10.1109/TAES.2003.1261119.
Keni Bernardin and Rainer Stiefelhagen. Evaluating multiple object tracking performance: the clear mot metrics. EURASIP Journal on Image and Video Processing, 2008:, 01 2008. doi:10.1155/2008/246309.
Ergys Ristani, Francesco Solera, Roger Zou, Rita Cucchiara, and Carlo Tomasi. Performance measures and a data set for multi-target, multi-camera tracking. In European conference on computer vision, 17–35. Springer, 2016.
Ángel F. García-Fernández, Abu Sajana Rahmathullah, and Lennart Svensson. A metric on the space of finite sets of trajectories for evaluation of multi-target tracking algorithms. IEEE Transactions on Signal Processing, 68:3917–3928, 2020. doi:10.1109/TSP.2020.3005309.
Xingyi Zhou, Vladlen Koltun, and Philipp Krähenbühl. Tracking objects as points. pages 474–490, 10 2020. doi:10.1007/978-3-030-58548-8_28.